
在做结构设计的时候,设计者往往会采用一面两销配上一面两孔,这是一种非常常见的定位结构,它能够有效限制零件的6个自由度。
而为了追求更高的定位精度和更低的经济成本,一个圆孔(主定位部分)加上一个长腰孔(副定位部分),在现在的定位结构中更容易被工程师们采用,它也能有效限制零件的6个自由度。比如下图:
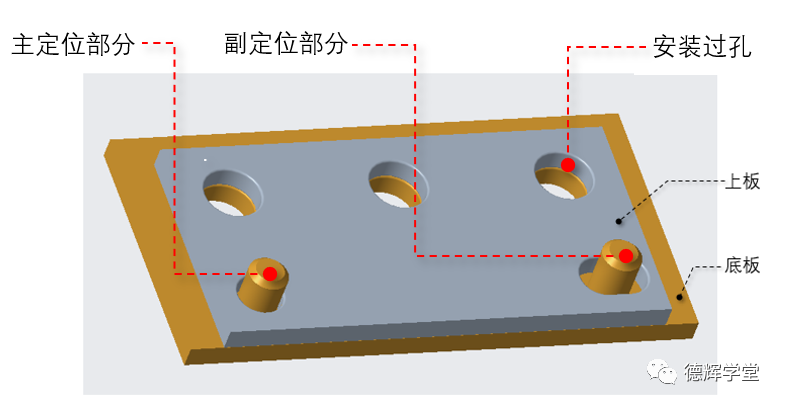
图1 一面两销和一面两孔
图1中,黄色底板用一面两销,而灰色的上板就是一面,一圆孔加一个长腰孔。这种结构在零件相互之间装配定位,或者在钣金件的焊接定位工装上经常被采用(比如汽车的副车架定位)。
动画1 上板和底板的定位
当工程师在设计这种“一面两销和一面两孔”时,为了方便装配操作,往往会在销孔之间留有少量的间隙δ,比如下图:
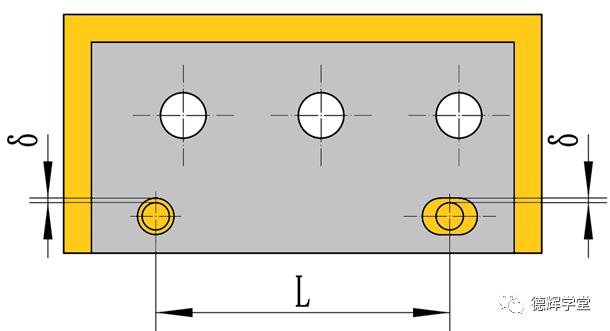
图2 销孔之间留有小间隙δ
就是因为这个不得不留的小间隙δ的存在,会给装配件之间的定位精度带来负面影响。比如,会让图1中的上板相对于底板发生随机的“浮动”,见下面动画:
动画2 两零件间的随机浮动
我们先假定图1中,两个零件定位好后,会被点焊固定。那么动画2中的随机浮动,无法被还原和复位,它对装配是有害的。
因为,它会让底板的3个安装孔,上板的3个安装孔,相互之间会发生“错位”的现象,导致两个零件的安装孔相互之间的“公共有效空间”会变小。
动画3 安装孔的运动轨迹
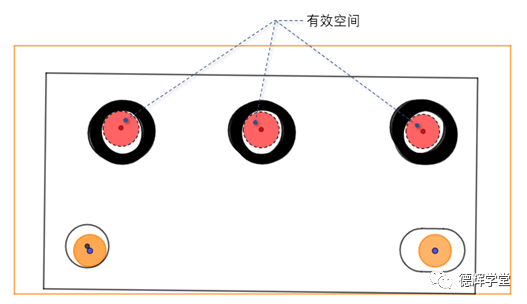
图3 变小的有效空间
见图3,红色的3个圆,就是在发生孔销浮动后,留下的空芯空间,这个空间才是可以用来穿螺栓或销子的“有效空间”。
不管怎样,就是因为孔销浮动,导致实际有用的有效空间(图3中红色的圆)比过孔自身的直径还要小。
所以,当孔销浮动发生后,工程师们更加关心的是,有效空间是多少?或者说,上板安装孔的中心相对于底板安装孔的中心偏了多少(工艺工程师们更加关心这个)?
本篇文章我们就一起来探讨这个问题。还是老套路,本期文章将分3个章节:
孔销浮动的现象
孔销浮动的数学模型
孔销浮动的具体应用
因为篇幅较长,本期文章我们只放送前面两章,最后一个章节我们下一期放送。
本期文章参考了国外学者撰写的相关论文,可能数学味道比较重,大家要有思想准备。但是,我们会结合大量动画和图例,尽量把其中的关系给大家讲清楚。
另外,本期文章主要集中探讨纯粹的孔销浮动,形位公差先不讨论。所以本期文章的假设前提是,每个零件都是刚性理想的。(最终形位公差带来的影响一定要讨论,下一期文章我们会讨论如何嵌入形位公差来综合分析)
在开始讨论之前,我们首先要在装配图中建立两个坐标系(见图4)。一个坐标系是XYZ(蓝色)是建立在黄色底板上,因为底板是不动的,所以我们把XYZ叫母坐标系(或全局坐标系),另外一个坐标系是xyz(红色), 是建立在灰色的上板上的,叫子坐标系(或者局部坐标系)。见下图:
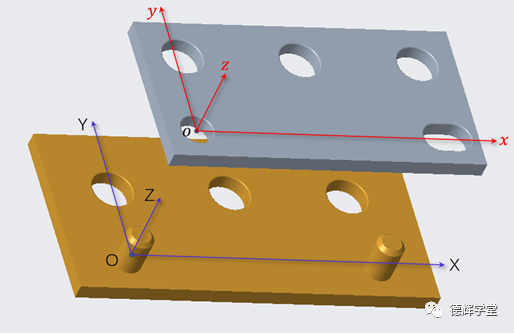
图4 两个坐标系
图4中的两个坐标系,我们后边会用到(因为零件比较薄,我们会主要用到2维的坐标系XOY和xoy)。
注意,本篇文章对研究基准偏移来说非常重要,对定位精度的研究也非常重要,希望在您耐心看文本期文章后,对您有所启发。
1. 孔销浮动的现象
本章节我们先来直观的认识一下孔销浮动。
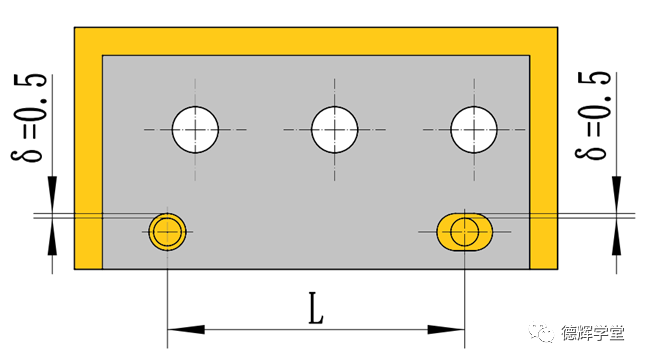
图5 销孔单边间隙是0.5
见图5,我们先假定主副定位销孔之间的单边间隙都是0.5,这样上板和下板之间就会发生随机的孔销浮动。
孔销浮动主要来源于两个,一个是来自于主定位部分的孔销浮动,一个是来自于副定位部分的孔销浮动。
当然,其他特征(比如3个安装孔)会因为定位部分的孔销浮动,被动地“浮动”。
我们一个一个来感受。
1)主定位部分的孔销浮动
主定位部分的孔销浮动比较简单,就是一个圆孔相对于一个圆销的随机浮动。
动画4 主定位孔相对于主定位销的浮动
动画4中,黄色的底板不动,上板在浮动。如果我们仔细观察上板主定位孔的中心,就会发现,该圆孔中心的浮动范围其实是在一个小圆内,这个小圆的半径就是单边间隙δ。
在极限的位置,就相当于主定位孔的中心,可以在一个小圆的圆周上游走。刚刚提到过,这个小圆的的半径就是单边间隙δ,也就是0.5。
动画5 主定位孔中心的极限运动轨迹
2)副定位部分的孔销浮动
副定位部分的主要功能是约束零件旋转的自由度,如果销孔之间有间隙存在,那么副定位孔相对于副定位销,就会有“旋转的浮动”,当然不是纯粹的旋转,还夹杂有平移,因为主定位孔在平移,必然会影响到副定位孔。
动画6 副定位孔中心的运动轨迹
如动画6中显示,副定位孔中心的运动轨迹的形状,相对复杂一些,其形状接近于一个“矩形”。具体见图6:
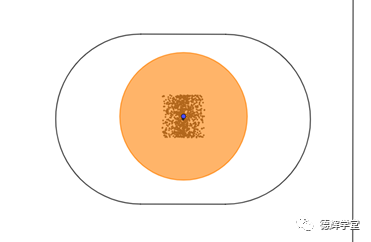
图6 副定位孔中心的运动轨迹
下一章节,我们会具体研究它的数学轨迹。
3)安装孔的浮动
因为定位部分的浮动,导致整个零件都在“抖动”。所以,3个安装孔,也在被动的抖动,我们来观察一下它的运动轨迹。
动画7 安装孔的运动轨迹
安装孔的运动轨迹会更复杂一些,总体看来有点类似一个“平行四边形”,而且处于不同位置的安装孔,它的运动区域形状都不一样。
大家先来感受一下安装过孔的活动区域,见图7,后边我们会详细解释区域的来源。
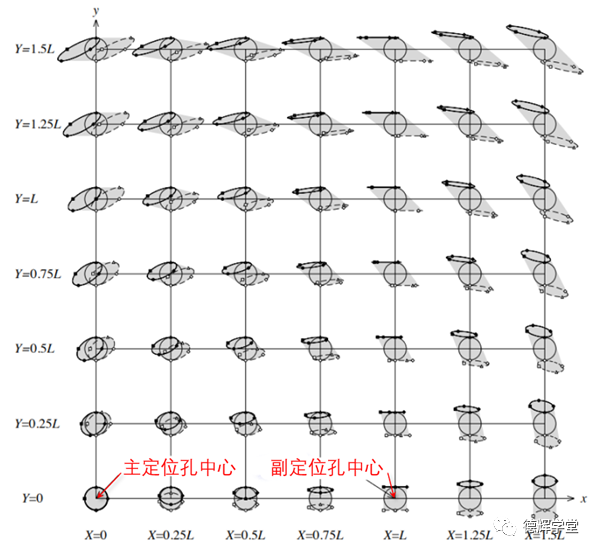
图7 处于不同位置安装孔的运动轨迹
2. 孔销浮动的数学模型
我们从上一个章节直观的感受了孔销浮动的现象。可是,如果要把它量化,就必须要把它的数学关系给它理清楚。
这个过程稍微有点痛苦,但肯定有价值。请大家跟着我的思路慢慢把它的数学关系给它理理清爽。
我们分析的整体思路是,先分析主定位孔的浮动,然后是副定位孔的浮动,最后是安装孔的浮动。
1)主定位孔的运动轨迹
我们现在已经知道主定位孔的运动轨迹,其实是一个圆形的区域。
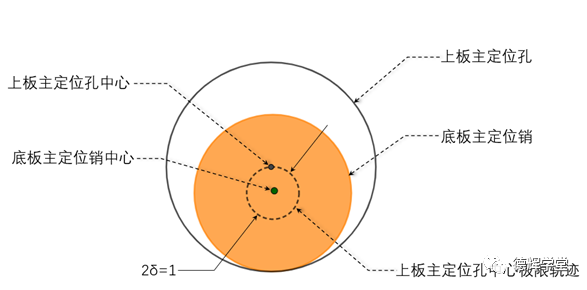
图8 主定位孔的运动轨迹
图8显示的是主定位结构中的销孔结构,以及主定位孔中心运动的极限轨迹,直径为2δ的圆。

图9 主定位孔中心B的浮动区域
图9显示的是主定位孔中心B的活动范围,要注意的是,主定位孔中心B的运动轨迹不仅仅是圆周,还包括在圆以内的区域。它是一个直径为2δ的圆形区域。
我们接下来就来研究,B点和底板主定位销中心O之间的关系。
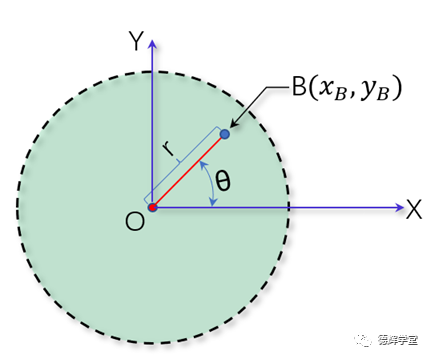
图10 B点坐标
见图10,我们先以主定位销的中心O点建立一个坐标系XOY, 再设定两个随机的参数,一个是BO的距离r, 另外一个BO连线和X轴的夹角θ(利用极坐标处理表方便)。
这两个独立的随机参数r和θ决定了B点在圆以内的随机位置。
显然,根据图10,我们知道r和θ的变化范围,r的变化范围在0-δ之间,而θ的范围是在0-2π之间。于是,我们就很容易得出B点在XOY坐标系中的坐标轨迹:

公式(1)中,因为r和θ是两个独立的变量,同时也是随机的,所以会导致B点的坐标xB和yB也是随机的,而且,B点肯定会在图10中绿色的圆以内。
2)副定位孔的运动轨迹
根据图11中的装配图中所示,我们设副定位孔和主定位孔之间的距离是L(一个已知的值),而且副定位孔和副定位销之间的间隙也是同样δ(0.5),见图11。
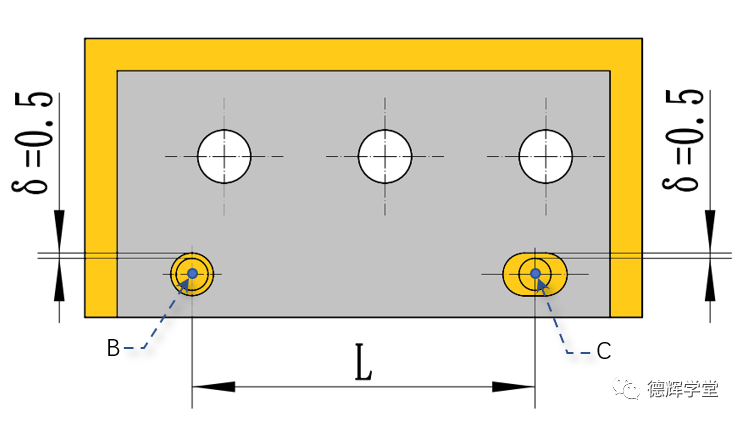
图11 装配图
如图11所示,我们先假设,副定位孔(长腰孔)的中心为C,它相对于黄色的底板,在上下方向(Y方向)上的浮动量为λ,不难得出结论,那么λ的变化范围是(-δ,+δ)。具体见图12,动画8和图13。
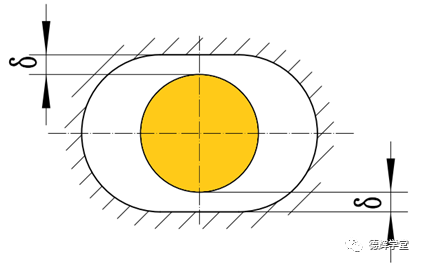
图12 单边间隙是δ
动画8 副定位孔上下浮动
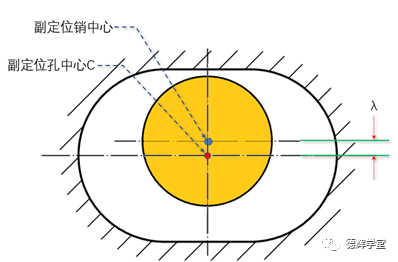
图13 副定位孔上下浮动量λ
根据图12,动画8,图13中的分析,我们不难得出C点的Y方向坐标为:

当然,λ也是一个独立的随机变量。
接下来,我们来求C点的X坐标xc。
实际上,副定位孔的运动轨迹稍显复杂,它会受到主定位孔浮动的影响, 它的运动不仅牵涉平移,还有旋转,是一个“复合”的浮动,见动画9。
动画9 副定位孔的复合浮动
经过动画9中显示的两种合成的复合运动后,我们再来分析副定位孔中心C的轨迹。
见动画10,图14,我们先做一些辅助线,简化后,再来分析里边简单的数学关系。
动画10 图形简化处理处理
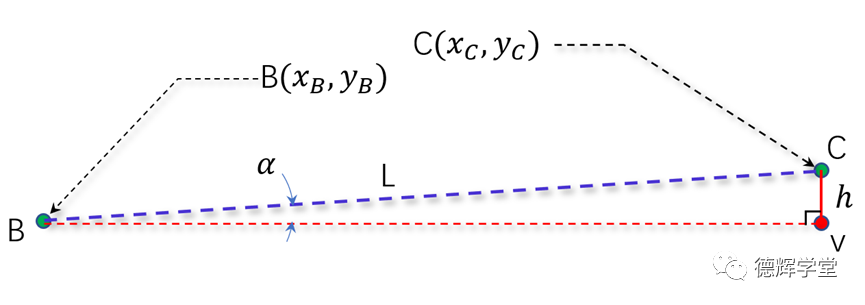
图14 副定位孔中心的坐标
见图14中的几何关系,显然BVC是一个直角三角形,我们不难得出h:

再结合公式(1)和公式(2),我写在下边:


可以得出:

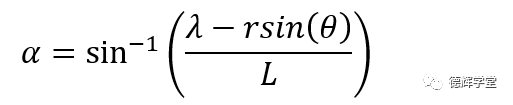
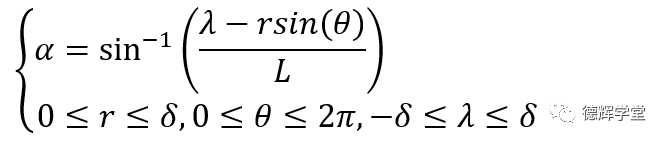
根据图14,h是直角三角形的直边, L是斜边,根据三角函数,我们就可以轻松算出图14中的旋转角度α:
请大家留意这个旋转夹角α,它很重要,我们后边还要反复用到。
有了旋转夹角α,我们就可以求出图14中的BV长度:

然后我们就可以轻易得出,图14中的C的X坐标:

再结合公式(1)和公式(4),我们可以进一步将公式(5)整理成:

于是我们便整理得出副定位孔中心C,最终轨迹:

其中,公式(6)的α是由下面公式获得:
公式(6)表达了副定位孔中心C的轨迹,推导的过程痛苦了一点,但是结果相对简单。实际上,C点的轨迹由3个独立的随机变量构成,一个是来自主定位孔的两个参数,r和θ,另外一个是来自副定位孔的浮动量λ。
3)安装过孔中心的轨迹
这个才是我们的重点。
我们知道了主定位孔中心B的轨迹,副定位孔中心C的轨迹,再来推导几个安装过孔的轨迹及相对容易了。
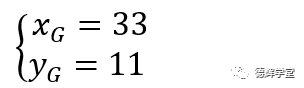
为了方便说明,我们先在上板建立子坐标系(这里只讨论平面坐标系)。我们把坐标原点建在B点,BC的连线作为x轴,这样零件的子坐标系xoy就建立了,见图15。
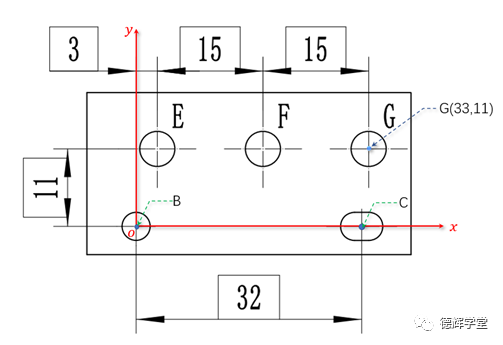
图15 上板和子坐标系xoy
图15中,我们把理论尺寸也标上去,因为这里不讨论零件自身的制造误差,所以我们就可以轻松得出3个安装过孔在子坐标系xoy中的具体坐标,比如说G孔中的坐标就是就是(33,11),写成代数形式:
注意,当零件加工好后,每个特征在子坐标系里边里的理论坐标是固定不变的。
而我们更加关心的是,在经历孔销浮动的震荡后,G孔相对于黄色底板的具体位置,或者说G孔在母坐标系里的具体坐标是多少呢?
在前面分析C点的轨迹时,动画9显示了两个零件的相对浮动状况,我们在动画9的基础上,将母坐标系XOY和子坐标系xoy给它建立起来。
动画11 子母坐标系的建立
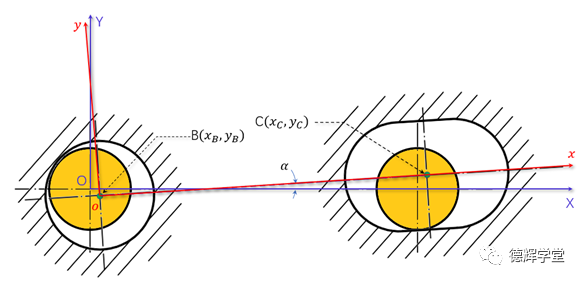
图16 子母坐标系
如果大家仔细观察图16中的两个坐标系,我们会发现两个特点:
1)我们知道子坐标系的原点B,在母坐标系中的坐标(xB,yB);
2)我们还知道子坐标系相对于母坐标系旋转的相对夹角α;
知道这两个条件,我们就可以利用旋转加平移实现坐标变换了(如果对坐标变换不理解的小伙伴,建议看本文最后链接的文章《基准偏移7,坐标变换》)。
为了方便大家理解,我把坐标变换公式再一次写在这里,简要做一下说明:
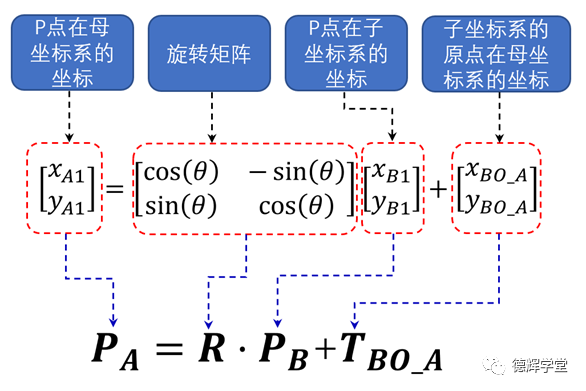
图17 坐标系变换公式
现在我们要计算图16中,G孔中心相对于底板(母坐标系)的具体位置,就可以直接套用图17中的公式。我们设G点在母坐标系中的坐标为(xG’,yG’), 则有下面关系:

稍作整理得:

如果不嫌麻烦,我们再将公式(7)展开成方程组的形式,最终便得到了安装孔中心G的坐标轨迹:

公式(8)中的一些参数,受到下面条件的限制:
公式(8)是我们推导到现在得到的结论。
公式(8)看起来牛逼,苦逼的样子,但是,仔细观察,会发现xG和yG是已知的,在本案例中就是(33,11),其余的说穿了就3个独立的变量,r, θ,λ,而且3个变量的范围我们已经很清楚,所以,根据公式(8),我们就能够确定上板G孔中心,相对于下板可能的运动轨迹了。
根据蒙特卡洛的思路(如果您对所谓的蒙特卡洛法也感到懵逼,看本期文章后边的链接文章),我们用软件(甚至Excel),随机产生3种参数r, θ,λ(在各自允许的范围内),产生参数的个数看心情,尽量多吧(建议大于500个),然后再带入公式8,就可以计算出G点在母坐标系中的坐标(xG’, yG’)。
因为输入了500套随机参数r,θ,λ,我们就可以得到500个G点的随机坐标(xG’,yG’)。这样我们就可以观察,在孔销浮动过程中,安装过孔中心G的轨迹。
软件的操作过程,这里不再赘述,大家直接看结果吧:
动画12 安装过孔中心G的轨迹
大家如果仔细观察动画12中,安装过孔中心的轨迹,就会发现,在孔销浮动时,安装过孔中心所经历的区域类似一个“平行四边形”的区域。
而且,安装过孔的位置不同,经历的区域形状也是不一样。
日本学者Shinya SUZUKI 和Noboru WAKAYAMA把针对不同坐标位置的过孔中心,所经历的区域都描述出来,我就将他们的图直接放在下边,供您观赏:
图18 安装过孔中心轨迹
仔细观察图18中的图形,我们会发现距离主副定位孔越远的地方,过孔中心浮动的范围就越大。见图19中最右上角红圈处的那个夸张的图形。
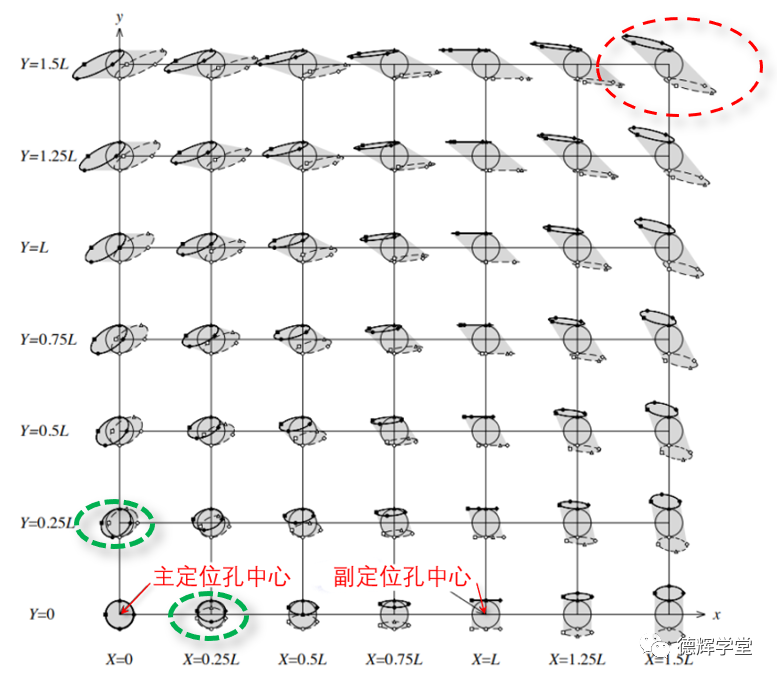
图19 不同位置特征的浮动轨迹
而距离主副定位孔(尤其是主定位孔)越近的地方,过孔中心浮动的范围相对偏小(但是最小的也比主定位孔中心浮动的圆形区域要大)。见图19中绿圈部分的区域。
很多定位结构中,有经验的设计工程师在设计定位销,或者定位孔的时候,会故意把定位特征之间的距离拉得很开。
您,现在理解其中的原因了吗?
到这里,我们还不能停下,我们还需要对安装过孔的轨迹进行放大研究。
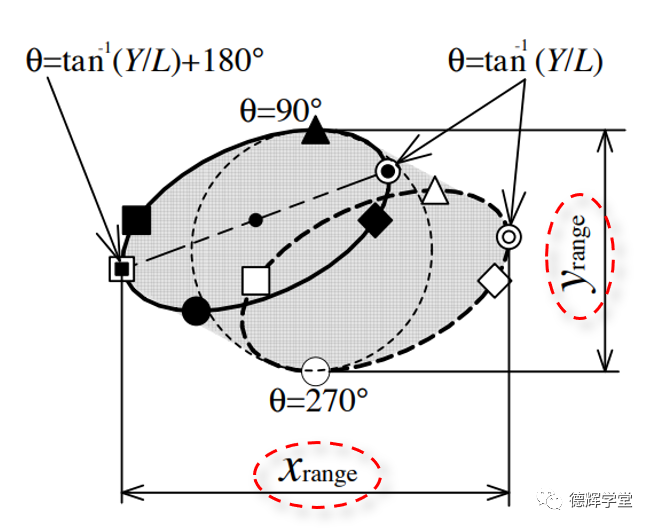
图20 安装过孔中心的轨迹
图20显示的是,在孔销浮动的过程中,安装过孔中心点的浮动范围(图中灰色区域,截取的是文献原图),它是一个类平行四边形区域。
保守的工程师们更加关心的是,安装过孔中心的浮动范围,x方向浮动的最大范围xrange是多少?y方向浮动的最大范围yrange是多少?
对于机加工,或焊接来说,这就是定位误差;对于基准偏移来说,这个就是补偿量(以后在详细讨论这个话题)。
图20中的xrang和yrang,我们利用公式(8)是可以推导出来的。因为整个推导过程比较复杂,还需要利用偏导和近似处理之类的数学知识,整个过程我就不再这里啰嗦了,我们还是直接享用专家们的学术成果吧:
上式中:
1)X,Y表示安装过孔在子坐标系(基于圆孔和长腰孔建立的坐标系)中的理论坐标;
2)δ表示定位孔和定位销之间的单边间隙(主副定位特征间隙都是δ);
3)L表示长腰孔中心(副定位孔)到圆孔中心(主定位孔)的距离;
4)θ的值由公式θ=arctan(Y/L)得到,它也是产生极值的条件。
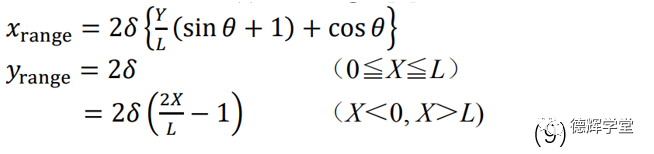
根据图20中图形的对称特性,我们把安装过孔中心处理成X方向和Y方向的线性尺寸:
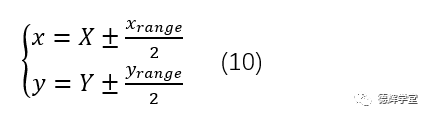
公式(10)中,
1) x,y表示安装孔的中心,因为孔销浮动,在母坐标系中,在X方向和Y方向的实际坐标范围;
2) X,Y表示安装孔中心在子坐标系中的理论坐标;
3) xrange,yrange则如公式(9)中表达的,安装孔中心因为孔销浮动的变化范围。
这样,如果我们要计算一维的尺寸链,就可以套用公式(10)了。
好了,本期的文章先到这里,希望本期文章对您有所帮助。
下一期文章,我们再来探讨基于本期文章所提供理论基础的实际应用。
本期小结
本期文章的主要内容,是研究一面两销配一面两孔(其中一孔是长腰孔)的定位结构中的孔销浮动,以及孔销浮动带来的影响。
第1章节描述了定位特征之间的间隙存在,会导致孔销浮动的产生,孔销浮动会在主定位特征之间,副定位特征之间都有产生,从而导致整个零件相对另外一个零件都在不断的“浮动”。
第2章节我们从数学的角度出发,探讨了主定位孔浮动的数学轨迹,副定位孔浮动的数学轨迹,还有其他特征被动浮动的数学轨迹,为我们后期做公差分析奠定了理论基础。
【后记】
在我过去的设计和顾问咨询经历中,经常会遇到孔销浮动的问题,搞清楚孔销浮动,尤其是多个孔销浮动的数学关系一直是我的想法。虽然VSA,3DCS等公差分析软件会给我们一个准确的结果,但是却没法搞明白其中的缘由。
直到有一天我看到日本长野大学(Nagano College)的学者Shinya SUZUKI 和他的合作者在2019年发表的关于孔销配合的论文,论文中详细描述了孔销浮动的数学关系。而且这位仁兄,不仅仅研究了圆销对长腰孔的数学关系,还那研究了圆销对圆孔,菱形销对圆孔的数学关系,对我启发很大。
所以,需要申明的是,本期文章的理论原型并非我个人原创,我只是传播者。
当然,还需要说明的是,上面的理论并非完美,还有很多问题亟待解决:
1. 既然其它特征的被动运动轨迹是一个类平行四边形区域,一般极值点会发生在4个角上,但是如果我想知道特定方向的变化范围,如何求得?比如图21中,我想知道N方向的极值点A,如何求呢?因为我们在分析轮廓的时候(比如缝隙,面差,均匀度),实际轮廓的法向很有可能并非X向,也非Y向, 而是某个特殊的方向。
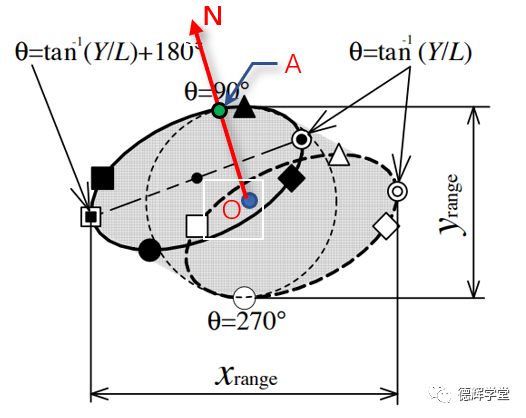
图21 特定方向的极值
2. 上述理论求得的x,y的变化范围是基于极值理论,而对于现实生产设计指导意义最大的还是基于概率统计,如何结合概率统计来分析呢?这也是一个需要解决的问题。
最后,要感谢我的学生,江苏理工学院在读研究生汤丽媛的协助,她帮我筛选和下载了不少论文,为我提供了有效的学术参考。
如果您对本文有任何不同的看法,或者建议,欢迎在留言区给我们留言!
参考文献:
Shinya SUZUKI and NoboruWAKAYAMA,设计工学681,Japan Societyfor Design Engineering,2019
Shinya SUZUKIa, Tohru KANADA,16th CIRP Conference on Computer Aided Tolerancing,ScienceDirect, 2020
同济大学数学系 高等数学第七版上下册 高等教育出版社 2008
于靖军 刘辛军 丁希仑 机器人机构学的数学基础 机械工业出版社 2018


