
数统治着宇宙
--毕达哥拉斯
**********************************************
本期我们来探讨一下尺寸链计算。
先来看一个题目,见图1,有两块板,分别为篮板和绿板,放在大理石平台上,每块板的高度已知,求两块板的高度差C0(不考虑形位公差)。
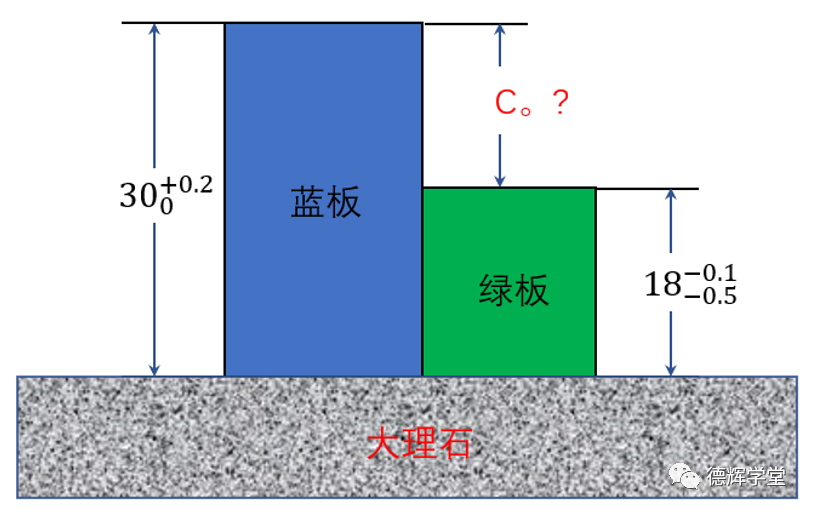
图1 求高度差C。
对设计工程师来说,这其实是一道再简单不过的计算题目。我在上课的时候,通常会告诉工程师们,用简单的三步法就可以搞定:
第一步,将所有相关的尺寸公差转化为对称公差。比如,蓝板的高度转化后为30.1±0.1,而绿板的高度为17.7±0.2。
第二步,封闭环的尺寸部分等于增环的尺寸之和减去减环尺寸之和。在图1中,很显然,C0是封闭环,蓝板的高度30.1±0.1为增环(它变化趋势和C0一致),而绿板的高度17.7±0.2为减环(它的变化趋势和C0相反),所以C0的尺寸部分为:
D_C0=30.1-17.7=12.4
第三步,封闭环的公差部分是增环公差之和加上减环的公差之和。蓝板的公差为±0.1, 绿板的公差为±0.2, 所以封闭环的公差为:
T_C0=±(0.1+0.2)=±0.3
所以我们可以得出最终封闭环C0(也就是高度差)的变化范围是:
C0=12.4±0.3
计算表格如下:

图2 计算表格
好了,尺寸链计算到这里就欧了。
事实上,很多聪明的工程师,哪怕不知道所谓的三步法,仅凭借直觉,也能将这个封闭环的结果给计算出来。
记得有一次,我在给学员上尺寸链的课,讲到这里的时候,一位年长的工程师严肃的问我,吴老师,你讲的三步法是属于经验技巧还是有理论依据?
这是位严谨的工程师,他的言下之意非常明确,如果我讲的所谓三步法没有理论依据,仅仅属于经验技巧的话,那么它的通用性可能会受到质疑。如果有理论依据,那么理论依据是什么呢,可靠吗?
本期文章的主题,我们就是来讨论一般线性尺寸链计算后边的理论依据。
本期的文章分为2部分:
1. 矢量累加和尺寸累加
2. 区间分析和公差累加
本期文章比较长,但是难度不大,如果您对尺寸链计算后边的数学原理感兴趣,欢迎您耐心看完。
1. 矢量累加和尺寸累加
本章节我们分为两个小节来讨论,首先快速普及一下矢量相加的基本知识,然后再来讨论尺寸累加。
1)矢量和矢量累加
在本公众号前面的文章中,我们就介绍过矢量,它是一个比较特殊的存在,它不仅仅有大小,还有方向,比如力。
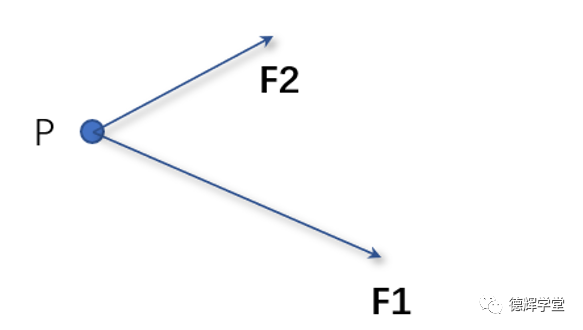
图3 一个物体受到两个力
见图3,我们高中就学过,如果一个物体P受到两个力F1和F2的作用,如何求这个物体P所受到的合力呢?
注意,这里F1和F2是被加粗的,本文表达的是矢量。
以前老师教过我们用平行四边形法或者三角形法求合力,见下面动画:
动画1 三角形法求合力F3
根据动画1可知,将F2平移后得到F2’显然有:
F3 = F1 + F2’ (1)
又因为矢量平移不改变矢量的性质,所以F2 = F2’, 那么由公式(1)可以得出:
F3 = F1 + F2 (2)
需要注意的是,等式(2)尽管成立,但是并不代表F3的大小等于F1的大小再加上F2的大小(我假设你知道三角形三条边的那个不等式)。
到这里,可能有小伙伴要问下面两个问题:
1. 为啥矢量可以任意平移?
2. 如果力的大小不能直接相加的话,那公式(2)对计算合力来说有啥意义?
关于第一个问题,做一个简单说明,我们上学那会儿学的矢量都是“自由矢量”,人们只关心矢量的方向和大小(也就是长度),不关心位置,所以当我们任意平移矢量的时候,矢量的方向和大小并不会改变,所以可以任意平移。
(注意,我们讨论的自由矢量,可以任意平移,但是有些矢量,比如位置矢量,线矢量,旋量等,和位置相关的,不能随便移动的)。
关于第二个问题,如果矢量的表达是使用坐标或者代数式来表达,公式(2)就有非常重要的意义。(事实上,矢量有很多计算规则,比如加法,减法,点乘和叉乘等,本期只讨论加法)
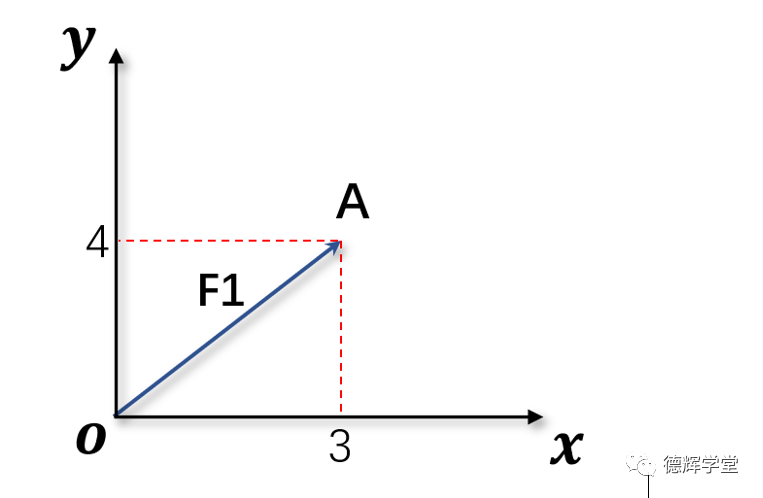
图4 矢量在坐标系中
如图4所示,有向线段OA表达的就是矢量(或者叫向量),A点的坐标是(3,4),如果用坐标表示矢量,则有下面关系:
F1 = OA = (3,4)
也可以用代数式来表达矢量,如下所示:
F1 = OA = 3i+4j
其中 i, j 分别表示x轴和y轴的单位矢量(这些概念公众号的往期文章都有介绍哦)。
矢量的坐标表达可以帮助我们理解它的几何意义,而矢量的代数式表达,可以帮助我们计算和推演。本期文章,我们两者都会用到。
需要特别注意的是,当用坐标表达矢量的时候,矢量的起点(没有箭头的那一端)必须放置在坐标系的原点,此时,箭头尖的坐标就是矢量的坐标。请再仔细观察图4中的OA.
如果矢量的起点不在原点,怎么求矢量的坐标呢?见图5A,如何求矢量O’A的坐标?
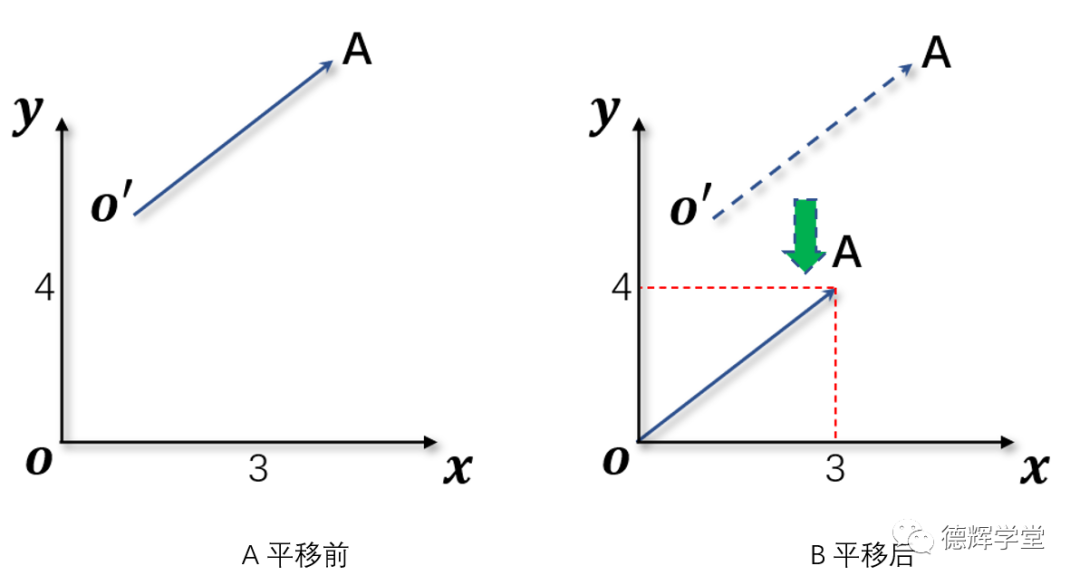
图5 平移矢量求坐标
图5中的A图,这时,我们是不知道矢量O’A的坐标的,但是,如果我们将O’A向下平移(再说一遍,平移不影响自由矢量的性质),使得O’点和坐标系原点重O合,见图5中的B图,这时,A点的坐标就是矢量的坐标。即有:
O’A = OA = (3,4) = 3i+4j
明白了么?当然,这些特点和性质是哪些牛逼的数学家们发现或者约定的,这样做有很多好处,比如,我们如何求O’A的长度(或者力的大小,或者叫矢量的模)?根据图5中B中的几何关系,不难求出:
|O’A| = |OA|

矢量的模很重要,因为我们算尺寸链的时候,无论是缝隙,面差,过盈量之类的,我们关心的是大小(矢量的模),而矢量本身我们不太关心。
矢量一旦用坐标来表达,矢量相加的计算就是小儿科了。我们直接用代数式可以来体验矢量相加的好处:
如果F1=ai+bj, F2=ci+dj,那么有:
F1+F2 = (a+c)i+(b+d)j
看到没?直接将X坐标相加,Y坐标相加(如果有Z坐标的话,如法炮制),分别作为新的X和Y, 这样就得到了矢量相加的结果。
举个例吧。
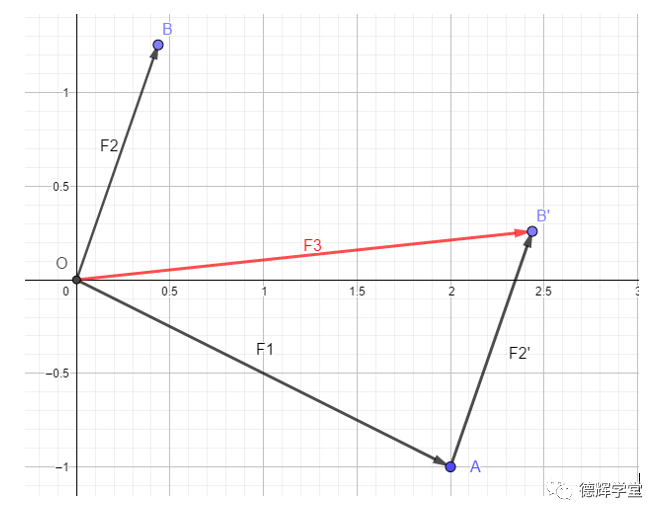
图6 矢量和的计算
见图6,已知矢量F1 =OA = (2,-1); F2 = OB = (0.44,1.26);已知F3 = F1+F2,求矢量F3的坐标和长度?
如图6中所示,根据三角形法,将OB平移,使得O点和A点重合,那么就有:
F3 = F1 + F2 = OB’
图6中的红色矢量就是两个矢量相加后形成的新矢量F3,这是F3的几何解释。
那么它的坐标是多少呢,我们可以用代数式直接计算:
F3 = F1 + F2 = (2i-j)+(0.44i+1.26j)
=(2+0.44)i+(-1+1.26)j
=2.44i+0.26j
所以矢量和F3的坐标为(2.44, 0.26)。再根据勾股定理F3的长度为:
|F3|

搞定。
如果仔细观察图6中矢量之和,以及箭头的规律,我们就会发现,如果一串矢量首尾相连,比如F1和F2’(甭管有多少个矢量),然后我们做一个新的矢量,比如F3,起点是第一个矢量的起点(F1的起点),终点是最后一个矢量的终点(F2的终点),那么这个新的矢量,就是其它首尾相连的矢量之和。
感觉太绕,直接上图说明一下吧:
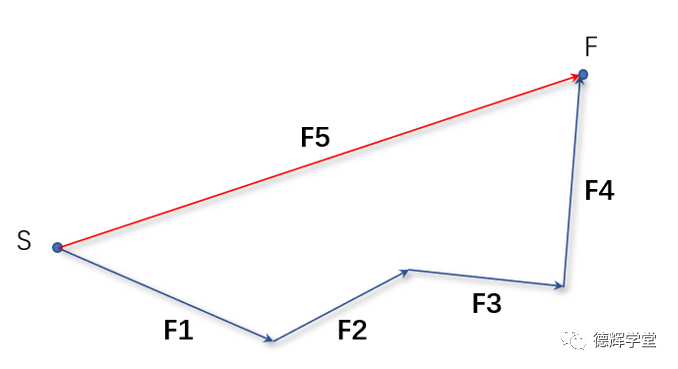
图7 矢量相加
图7中的矢量F1,F2,F3,F4就是首尾相连的矢量,红色矢量F5就是他们之和,即:
F5 = F1 + F2 + F3 +F4
相信很多数学基础比较好的小伙伴开始不耐烦,您在这里瞎咧咧半天,到底想说啥,和尺寸链计算有关系吗?
有关系的,在实际的公差计算中,F5代表封闭环,F1-F4代表的是组成环(也就是增环和减环的总称)。
我们在零件尺寸链,部件尺寸链,甚至整车尺寸链计算中,计算的其实就是矢量叠加!只是就一维的尺寸链计算来说,它是图7中的一种特殊情形,我们后边讨论。
在跳到下一个小节之前,我们先小结一下刚刚讲过的知识点:
1. 矢量之和可以用三角形法作图表达,实际上就是多个矢量首尾相连叠加后的结果。比如图7中的红色矢量,它表达了矢量叠加的几何意义;
2. 矢量可以用坐标表达,或者用代数表达,本质上是一样的。比如矢量F1既可以表达成F1=(3 , 4),也可以表达成 F1 = 3i + 4j ,(当然,本期文章用的2D的案例,3D的话,再增加一个Z坐标即可);
3. 矢量相加,实际上就是多个矢量对应的XYZ坐标分量分别相加。
现在我们进入第二小节。
2)矢量累加和尺寸累加
图7中显示的矢量累加的一般情形,在我们一般的尺寸链累加中,遇到更多的是一维的累加(或者,我们把它处理成一维的累加),它属于一种特殊情形。
它特殊在哪里呢?它特殊之处在于矢量之间的夹角θ。
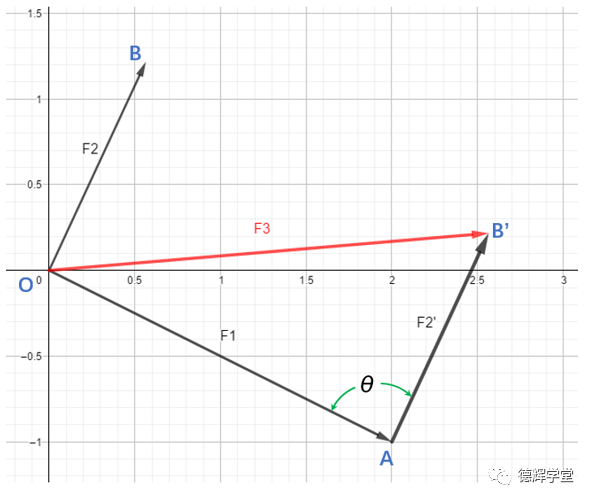
图8 矢量间的夹角θ
一般的计算中,我们遇到矢量间的特殊夹角一般是0°(组成环矢量的方向相同)或者180°(组成环的矢量方向相反)。
动画2 矢量间的夹角是0°
矢量间夹角是0°的情形见动画2。
实际案例见图(9),已知板1,板2,板3每块板的厚度分别为D1,D2,D3, 求总厚度C.0(不考虑形位公差)。
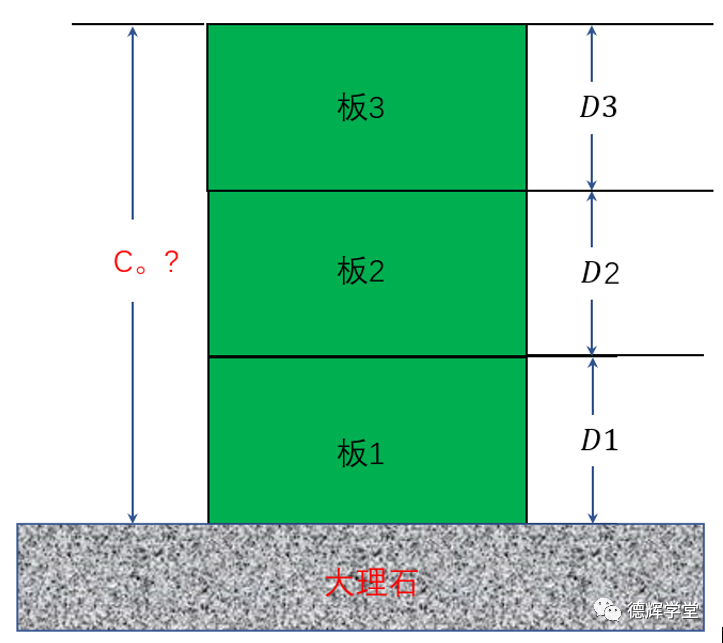
图9 计算3板总厚度
当然,如果不用所谓的矢量计算,我们可以用加法直接计算,显然有:
C0 = D1 + D2 + D3 (3)
但是,为了用矢量来解释计算是否合理,我们再用矢量来计算一遍,先画矢量图,再建立坐标系:
动画3 建立矢量图和坐标系
动画3中建立的矢量图,组成环的矢量分别为F1, F2, F3, 封闭环的矢量为C0, 我们分别将矢量F1, F2, F3这3个矢量的起始点移到坐标原点,便可以得到他们的坐标(显然,他们和Y坐标轴重叠):
F1 = (0,D1) = 0i+D1j =D1 j
F2 = (0,D2) = 0i+D2j =D2 j
F3 = (0,D3) = 0i+D3j =D3 j
我们再假设C0的坐标为(Cx, Cy), 也就是C0 = Cxi + Cyj
再将F1, F2, F3, C0同时移到Y轴,见动画4。
动画4 矢量相加
显然,根据动画4中的矢量表达,显然矢量C0是矢量F1, F2, F3之和:
C0 = F1 + F2 +F3
再代入每个矢量的代数式:
Cxi + Cyj = D1j + D2j + D3j
稍微整理有:
Cxi + Cyj = 0i + (D1+ D2 + D3) j
可以得出:Cx = 0 , Cy=D1+D2+D3
所以矢量C0=(0,D1+D2+D3)=(D1+D2+D3)j
这时我们更加关心的三个板的高度,也就是矢量C0的长度,所以有
| C0| = D1+D2+D3 (4)
(这里就不在啰嗦勾股定理了,一条边的长度是0哦)
可以看出,按照矢量计算,和公式(3)计算的结果是完全一样的。
注意,图9中,没有减环,全是增环,所以根据公式(4),计算C0的长度结果是各个组成环长度之和。
这里还需要强调一下,动画3中,我们在建立坐标系的时候,要特别注意,坐标系的原点一定要放在封闭环的一端,从坐标系原点指向封闭环的另外一端作为坐标轴的正方向,这样,封闭环的方向永远是正方向,这对封闭环计算结果的判断更加直观。
我们再来看另外一种情形,组成环之间的夹角是180°,也就是组成环之间的方向相反(首尾相连作为前提),这时会产生减环。见动画5。
动画5 组成环之间的方向相反
本期文章的第一个案例就出现矢量方向相反的情形,见下面图9:
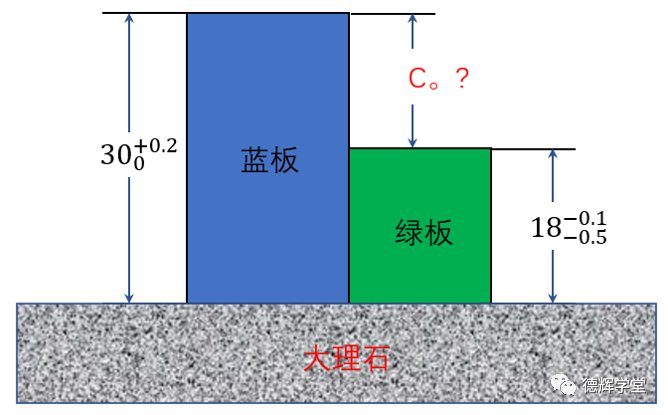
图9 求高度差
同样,我们建立矢量,建立坐标系:
动画6 矢量图建立
见动画6,将朝下的方向定义为y轴的正方向。所以,如果矢量D1和D2的起始点放在坐标系的原点O,可以分别得到D1和D2的矢量坐标:
D1 =(0, 30+0.2/0)= (30+0.2/0)j
D2 =(0, -18-0.1/-0.5)
= -(18-0.1/-0.5)j
再将这些矢量移到一个数轴上,见动画7:
动画7 矢量相加
如果仔细观察动画7,发现D2的Y坐标值是负值。如果还不理解,看下面这个动画8,注意,坐标轴朝下是正方向哦。
动画8 向量D2的坐标
从动画8中可以看出,D2的方向,和封闭环的方向是相反的,所以,它是一个减环。
另外,我用带公差的数值来表达坐标,大家不用感到意外,就把它看成一个数就OK了,后边我们会用区间法再来分析。
根据动画:7中的矢量关系,显然有:
C0 = D1 + D2
=(30+0.2/0)j +(-(18-0.1/-0.5)) j
=((30+0.2/0)-(18-0.1/-0.5)) j
封闭环矢量知道了,我们可以轻松算出C0的长度:
|C0| =(30+0.2/0)-(18-0.1/-0.5) (5)
再一次强调,建立坐标系的重要性(见动画6),将坐标系原点放在封闭环的一端,坐标原点指向封闭环的另外一端作为正方向,这样使得封闭环的方向在坐标系里边,永远是正的。而且,在组成环的矢量里边,正方向的矢量就是增环,负方向的矢量就是减环。
当然,归根结底,见公式(5),我们纠结增减环的目的,主要是为了方便在计算封闭环的时候,应该采用加法还是减法。
结果很明确,增环用加法,减环用减法(因为它的坐标值就是负的)。
到这里,第一章节就结束了,还是小结一下,本节啰里啰嗦半天,就说明以下内容:
1. 任何尺寸链的计算,都可以用矢量和来表达,也就是可以用首尾相连的矢量图来表示,组成环就是这些矢量,而矢量之和就是封闭环。
2. 对于一般的线性尺寸链,大部分是单维度的(一维),要么只有X轴的分量,要么只有Y轴的分量,这些分量的大小就是具体的尺寸,所以计算起来非常简单。
3. 因为尺寸链必须表达成首尾相连的矢量和,在一维的尺寸链里边,有可能组成环之间的矢量方向会相反,这样就会产生减环。
4. 判断增减环的方法,和建坐标系有关系,一般的建议是,把封闭环的方向设置成坐标轴的正方向,然后看组成环的方向,和封闭环方向相同的是增环,相反的就是减环。当然,在计算的时候,增环用加法,减环用减法。
2. 区间分析和公差累加
我们前面讲过,如果将尺寸公差转化成对称公差后,尺寸部分增环用加法,减环用减法,而公差部分,永远用加法。
公差部分,为啥永远用加法呢?对它的这种处理方法是否有数学依据?
当然有,我们先来了解区间分析,然后再来看公差累加。
1)区间数学的基本知识
区间这个概念,高中学函数时就接触过,我们确定定义域的范围,值域的范围的时候,就会用到区间(高考出题者经常会卑鄙的用这招来考我们)。
简单举个例子,如X∈[2, 8],它表达的就是区间(2≤X≤8),表示X是一个从2到8之间的实数,比如X可以是2,2.4, 5,7 等等。
区间数学,它其实是数学的一个分支。基于区间数学的分析,叫区间分析(Interval Analysis),它最早是在1966年由 Ramon E. Moore出专著提出。
慢点,为啥我们要扯区间分析这种学术性的东西?
因为公差(Tolerance),不管是尺寸公差,还是几何公差,它本身是不是就是一个区间啊?
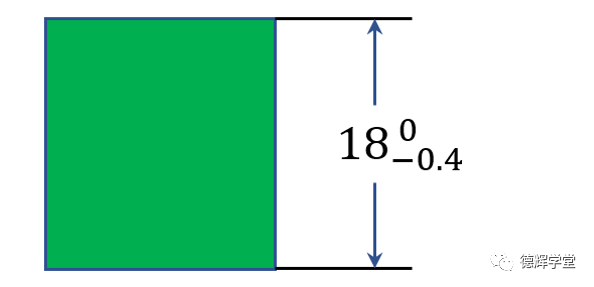
图10 板的高度公差
比如图10中,板的高度是由客户的设计工程师规定,而供应商加工出来的实际零件,在合格的情况下,设它的实际高度为X,X具体是多少,谁也说不清,但是我们知道它所在的区间(不考虑形位公差),即:
X∈[17.6 , 18]
同志们,所有的零件,在测量之前,其实我们都不知道它的具体尺寸是多少,我们只知道它的区间。而我们苦逼的设计工程师,尺寸工程师,每次要计算的,不是将几个具体的数值简单的累加起来,而是在对几个区间进行累加。
所以,公差分析,实际上就是区间分析!
区间分析的内容很多,我们还是只捞出和线性公差累加相关的知识点来吧。
1. 区间的加法
如果 X = [ a , b ] , Y = [ c , d ], 那么有:
X+Y = [ a+c , b+d ]
这个应该好理解,两个尺寸公差相加的时候,上限加上限就是上限,下限加下限就是下限(我假想您知道我在说什么)。
当然,上面的定义要完善一下,比如,X,Y, a, b, c, d都属于实数R,而且a≤b, c≤d。
举个例吧,比如:X = [ 9 , 10 ] , Y = [ 5 , 6 ],那么有:
X + Y = [ 14 , 16 ]
2. 区间的减法
如果 X = [ a , b ] , Y = [ c , d ], 那么有:
X-Y = [ a-d , b-c ]
这个也应该不难理解,下限减去上限就是下限,上限减去下限就是上限。有点绕,但是相信您也知道我在说什么。
严谨起见,同样有X,Y, a, b, c, d都属于实数,而且a≤b, c≤d。
同样,举个例吧,比如:X = [ 9 , 10 ] , Y = [ 5 , 6 ],那么有:
X - Y = [ 3 , 5 ]
3. 区间的中点和宽度
如果有 X = [ a , b ],那么该区间有中点m(X)和宽度w(X)
m(x)=(a+b)/2, w(x)=b-a
这个也不难理解,比如尺寸公差10+0.20,它的中点就是m(x)=10.1,宽度w(x)=0.2, 也就是公差。
这一点,您在将尺寸公差转化成对称公差的时候,是不是很熟悉?
4. 点区间和对称区间
如果有X = [ a , b ],其中a=b, 那么X所在的区间就是点区间,实际上就是一个点(或者一个数)了。即:
X = [ a , a ] = a
如果有X = [ -a , a ],(其中a>0), 那么X所在的区间就是叫对称区间。对称区间最大的特点是,两个对称区间相加和相减的结果居然是等同的(这个有点罕见哦)。
比如 X = [ -a , a ], Y = [ -b , b ], (其中a>0,b>0),那么我们利用区间的加法和减法计算,不难得出:
X + Y = [ -a-b , a+b ] =(a+b)[-1, 1]
X - Y = [ -a-b , a+b ] =(a+b)[-1, 1]
看到没有?对称区间的加法和减法的结果是相同的。
另外,我们把 [-1, 1] 叫单位对称区间,它前边的系数a+b叫区间半宽。
对上面的案例,我们再做一个推演(这样就越来越靠近公差累加了)。
因为X = [ -a , a ], 可以转化成:
X =a[-1, 1] (6)
其中a就是区间半宽(a>0)。
又因为Y = [ -b , b ], 可以转化成:
Y =b[-1, 1] (7)
其中b就是区间半宽(b>0)
将一个对称区间的格式写成(6)和(7)样式,半宽和单位对称区间的乘积,这样的格式我们取名叫标准对称区间。
标准对称区间的特点是,无论是相加或者相减,它得到的结果都是半宽系数之和再乘以单位区间。如下:
推论1:多个标准对称区间之间的和或者差,等于他们的半宽之和乘以单位对称区间。
假设有X =a[-1, 1] , Y =b[-1, 1], Z =c[-1, 1], (其中a>0,b>0,c>0),那么有:
X+Y-Z = (a+b+c) [-1, 1]
X-Y+Z = (a+b+c) [-1, 1]
推论2:对于任何一个区间X∈[ a, b ],都可以写成区间中点(或者点)再加上一个标准对称区间,它的这种格式,我们把它叫区间的对称格式。即:
X = [ a, b ] = m(x)+w(x)/2[ -1, 1 ]
= (a+b)/2 + (b-a)/2[ -1, 1] (8)
其中,区间中点m(x)=(a+b)/2, 区间宽度w(x)=b-a.
推论2的公式看起来有点复杂,实际上很简单,也很容易证明:
X=(a+b)/2 + (b-a)/2[ -1, 1 ]
= [ (a+b)/2, (a+b)/2] + [ -(b-a)/2,(b-a)/2]
= [ (a+b)/2-(b-a)/2,(a+b)/2+(b-a)/2]
= [ a, b ]
上面的证明,包括公式看起来有点眼花缭乱的样子,事实上,您如果计算过尺寸链,要把某个尺寸公差转化成对称公差,您肯定自觉或者不自觉的用过上面的推论2。
推论2理解起来很很简单,站在尺寸公差的角度,就是说,任何尺寸公差都可以表达成对称公差。
是不是So easy?
2)区间分析和公差累加
前面讲了半天,和公差累加有关系吗? 当然有!因为:
区间 = 公差
比如尺寸公差D=100+0.2, 如果写成区间形式,则为:
D = [ 10, 10.2 ]
根据推论2,如果将D的区间格式写成对称格式,则为:
D =10.1 + 0.1[ -1, 1 ] (9)
如果将尺寸公差变成对称公差:
D = 10.1±0.1 (10)
比较一下公式(9)和公式(10),是不是很相似?实际上它们本质是一样的,见图11中表达的对应关系:
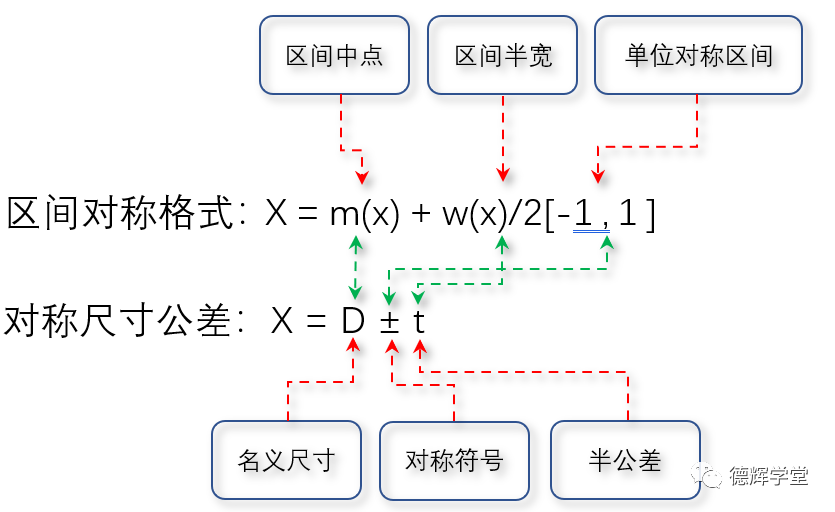
图11 区间对称格式和对称尺寸公差的对应关系
好了,我们现在知道了区间分析的一些特点,也知道了尺寸对称公差和区间对称格式之间的对应关系,我们在计算尺寸链的时候,根据区间分析的特点,就可以灵活处理尺寸部分和公差部分了。
比如,在一个线性一维的尺寸链里边,有三个尺寸环(组成环), X1=D1±t1, X2=D2±t2, X3=D3±t3, 在矢量图里,X1, X2是增环,X3是减环,求封闭环C0?
这里不考虑矢量图,我们直接考虑数据的计算部分,显然有:
C0 = X1 + X2 – X3
= (D1±t1) + (D2±t2) – (D3±t3)
注意,上边的计算实际上就是区间的加法和减法计算,D1, D2, D3可以看成点区间(实际上就是一个点, 或者一个值),把它们一起处理,处理起来也很容易,直接加减就OK, 而±t1, ±t2, ±t3则是对称区间,根据对称区间的特点,不管是加减,都是将半宽之和直接相加。所以有:
C0 = (D1±t1) + (D2±t2) – (D3±t3)
=(D1+D2-D3)±(t1+t2+t3)
您,看明白了吗?
还是综合举一个案例吧,已知装配关系和零件尺寸如图12所示,要求δ的变化范围(不考虑形位公差)。
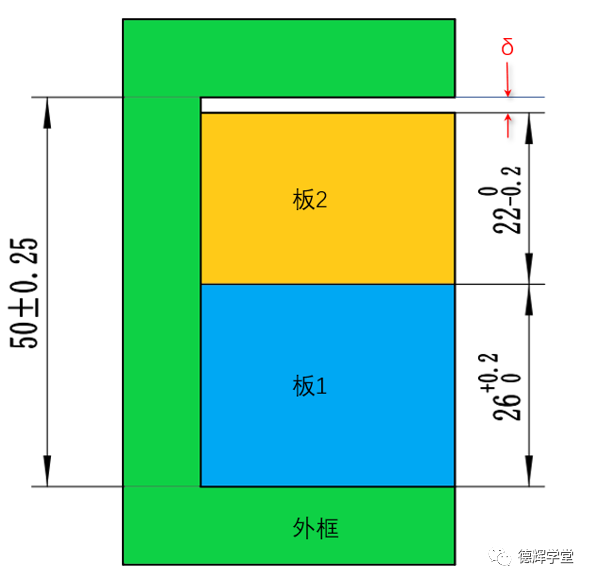
图12 综合案例
图12中,板2和外框之间的缝隙δ是封闭环,要计算它的大小,根据第一章讲的,建立坐标系,画出矢量图,见下图:
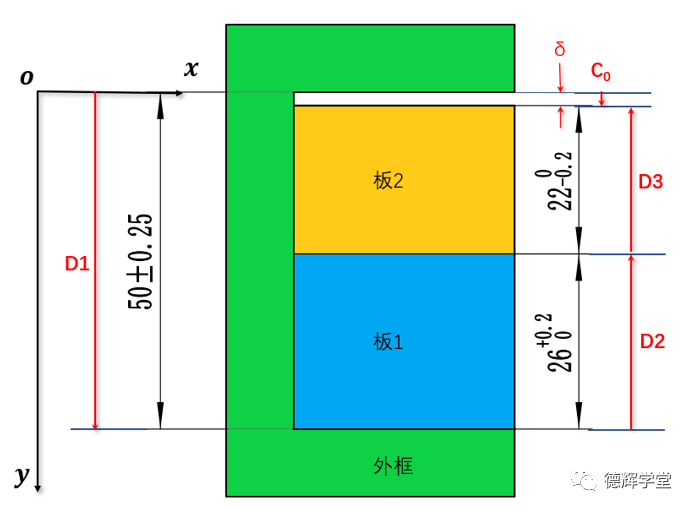
图13 矢量图
根据图13的矢量图,显然有:
C0 = D1 + D2 + D3
其中每个矢量的坐标为:
D1 = ( 0, 50±0.25 ) =(50±0.25)j
D2 = ( 0, -260+0.2) = -(260+0.2) j
D3 = ( 0, -220-0.2) = -(220-0.2) j
所以可以得:
C0 = D1 + D2 + D3
=(50±0.25)j - (260+0.2) j - (220-0.2)j
=(50±0.25 - 260+0.2 - 220-0.2)j
最后可以得出:
δ = |C0| = 50±0.25 - 260+0.2 - 220-0.2
显然,δ是一个区间,要算出δ的大小,就是要处理区间分析的问题了,根据我们前面讲的知识点,先将尺寸公差处理对称公差,然后利用推论1,则有:
δ = 50±0.25 – 26.1±0.1– 21.9±0.1
=(50-26.1-21.9)±(0.25+0.1+0.1)
= 2 ± 0.45
当然,也可以用EXCEL表格计算,如下:

图14 尺寸链计算表格
您理解了吗?
好了,本文到这里就结束了,希望对您有所启发。
本文小结
本期文章探讨的是基本的线性一维尺寸链计算,它背后的数学原理,或者说理论依据。
第一章节,我们介绍了矢量的基本概念,然后介绍了尺寸链实际上就是矢量累加,因为每个封闭环都可以表达成矢量和的形式。当然我们又介绍了,如何取得每个矢量的坐标值,或者代数表达式,要注意的是,减环的矢量坐标是负值。
第二章节,我们介绍了区间分析的基本知识;然后指出,公差累加,实际上就是区间累加,而且我们介绍了标准对称区间,以及区间的对称格式,以及它们累加时的特点;最后指出,对称的尺寸公差,实际上就是区间的对称格式。
最后我们用一个简单的案例,综合回顾了第一章节,第二章节知识点的应用,证明了常规计算尺寸链方法的合理性。
【后记】
本期文章的目的,本质上是在为我们平时计算尺寸链累加所用的方法寻求理论依据,证明其合法性。相当于强行扯过来一顶光鲜的帽子戴在头上,表示其光鲜。
尽管帽子是临时扯过来,大小却是合适的。
企业工程师计算尺寸链累加所用的方法,似乎是口口相传,很少有人思考后边的理论依据。如果我们所用的方法,缺乏理论依据,其实是危险的,有可能在某些特殊情况下,我们的方法就不能使用了,这可能会闯祸的。
我在上课时,也被工程师们质疑过,很是惭愧,我之前也没有系统思考过这个问题。不过这次趁春节假期,被疫情困在家里,梳理了一下后边的原理。
我是用矢量和区间分析来解释我们计算尺寸链的方法。相信不是唯一的理论依据,有兴趣的小伙伴,也可以思考其它的理论依据。
如果觉得文中理论有问题,欢迎随时给我留言哦。
参考资料:
同济大学数学系 高等数学第七版上下册 高等教育出版社 2008
Moore, R., 1979, ‘‘Methods and Applications of Interval Analysis,’’ Society for Industrial and AppliedMathematic, ISBN 0898711614



